
该项目服务对象为国内某大型制造企业。客户需要以穿梭车作为移动平台(穿梭车可另外选型),协作机器人作为机械臂,构成复合机器人.在托盘库间来回穿梭,按订单任务拆零拣选,在托盘库货架上从顶面进行拆垛纸箱。但由于托盘库货架内部非常狭窄,机械臂可操作空间十分有限,且对于速度和稳定性要求高,希望天隼科技能解决上述问题。

1、接到拆码任务后,穿梭车行驶到垛的位置,4台固定相机开始对可拆码箱子进行初定位,智能轨迹规划算法,联合穿梭车、机械臂规划拆码路径。
2、当机械臂末端走到箱子附近后,手上相机对箱子进行精确定位,进行最后的抓取
3、放置箱子
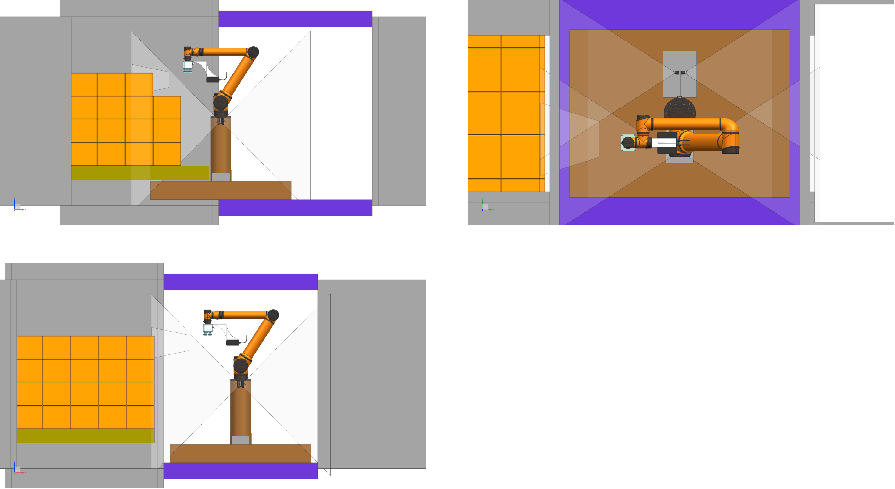
总体方案示意图
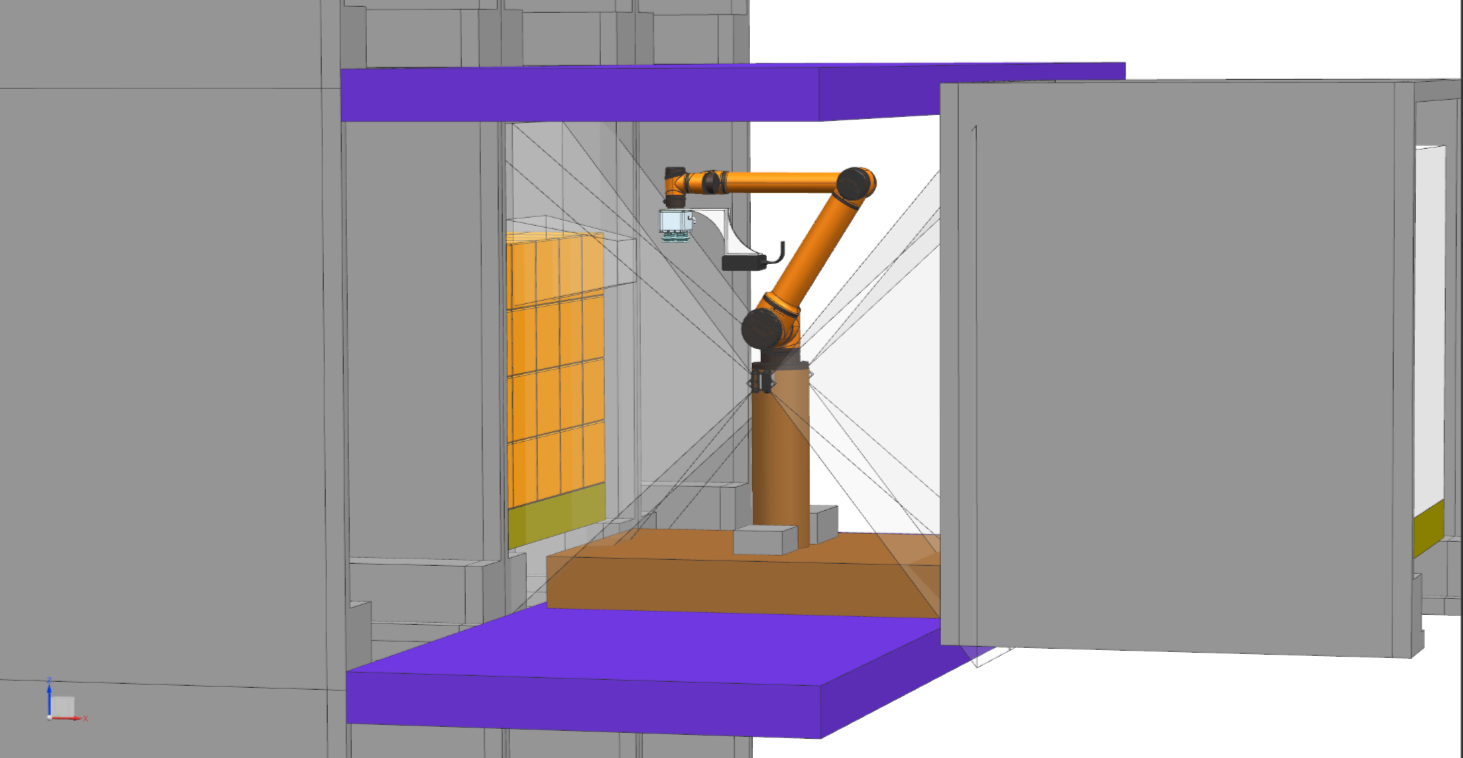
空间布局
高效 | 精准 | 灵活 | ||
快速对货物拆垛、分拣,大大提高了物流效率。 | 通过高精度的传感器和视觉系统,准确地识别货物的位置、形状和尺寸,从而实现精准的拆垛和分拣。 | 可以根据不同的货物类型和规格进行自适应调整,从而实现灵活的应对不同的物流需求。 |
 微信二维码
微信二维码