
精准喷雾机器人由底盘系统、视觉系统、变量喷雾系统、导航系统组成。小车行进中双3D相机动态获取两侧待喷施树木RGBD图片信息,利用深度学习算法识别出喷施对象的密集度和距离根据识别结果及车速计算出喷头的开关流量同时计算各喷头喷洒抛物线角度,并控制电机实时调整姿态最终到达小车运行过程的预判精准对靶喷施。
|
型号 |
TSPW-1 |
TSPW-2 |
|
|
类型 |
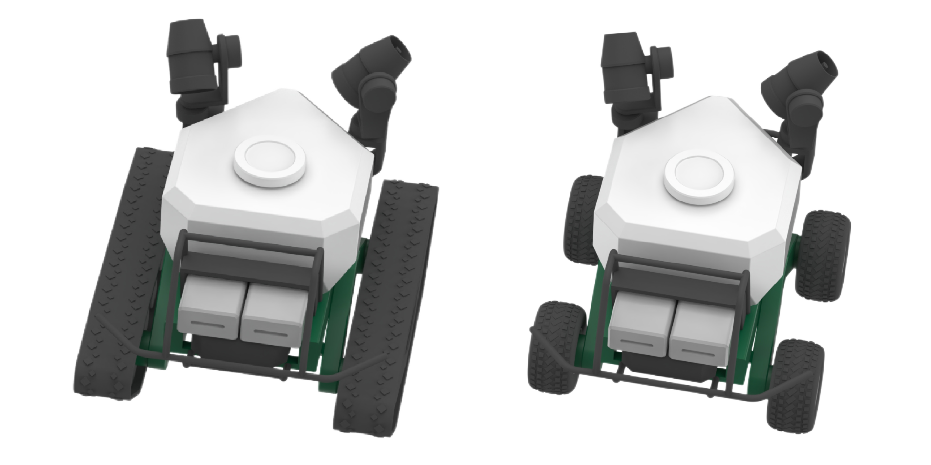
履带式 |
轮式 |
|
|
药箱容积 |
L |
120 |
120 |
|
喷杆长度 |
mm |
3000 |
3000 |
|
喷雾距离 |
m |
1.5 |
1.5 |
|
喷雾均匀度 |
% |
>90 |
>90 |
|
喷杆可调高度 |
mm |
300 |
300 |
|
喷雾流量 |
L/min |
7-15 |
7-15 |
|
最大行走速度 |
m/s |
1.2 |
1.5 |
|
最小转弯半径 |
m |
0 |
0 |
|
左右倾斜度 |
° |
≤10 |
- |
|
爬坡能力 |
° |
≤15 |
- |
|
精准喷雾系统 |
环境智能感知与自主避障 |
多地形作业与导航 |
||
|
深度学习和3D算法技术识别出喷施对象的密集度和距离,实现对作业对象的定位和识别,根据识别结果及车速计算出喷头的开关流量,轻松计算出各喷头喷洒抛物线角度,并控制电机实时调整姿态,实现机器人在行驶过程中精准喷雾任务 |
环 360°雷达通过不间断扫描,可预先探测作业环境和障碍物信息,并根据所处环境及时调整行走策略,实现自主避障 |
针对农业地形和材质的多样性,提供履带式、轮式或轨道式多种行走系统和驱动方式满足不同场景要求 |
|
场地类型 |
果蔬种类 |
|
|
果园果蔬采摘现场 |
单果番茄、串番茄、葡萄、黄瓜、草莓、橘子、猕猴桃等 |
 微信二维码
微信二维码